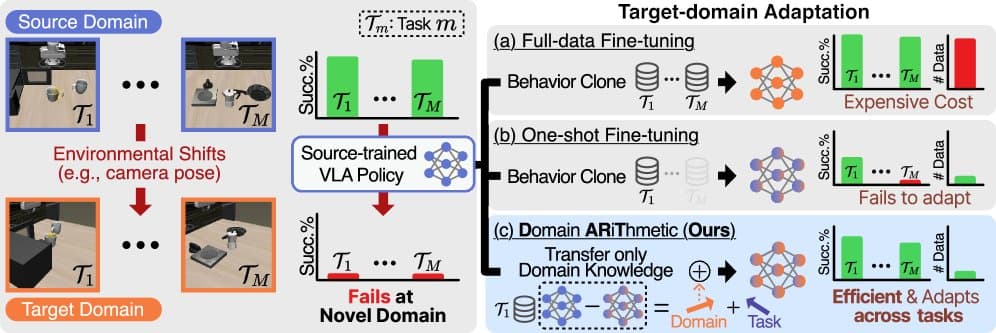
A research team from Stanford University has demonstrated a significant transfer learning capability in embodied AI. Their work shows that a Vision-Language-Action (VLA) model, originally trained to control a robot arm for manipulation tasks, can be successfully adapted to perform a fundamentally different task: autonomous drone flight.
What Happened
The core finding, shared via social media by AI researcher Rohan Paul, is that the representations learned by a VLA model in one physical domain (robotic manipulation) contain transferable knowledge that enables control in another domain (aerial navigation). This suggests that these multimodal models are learning more generalizable concepts about the physical world—like object permanence, spatial relationships, and the consequences of actions—rather than just task-specific motor patterns.
While the original tweet does not provide exhaustive technical details, the implication is clear: the researchers performed a form of fine-tuning or adaptation, likely by swapping the low-level action output head of the model and retraining it on drone control data, while keeping the bulk of the vision-language backbone frozen or lightly tuned.
Context
Vision-Language-Action models represent a frontier in robotics and embodied AI. They combine visual perception (from cameras), language understanding (for commands or instructions), and direct control output (joint torques, velocities, or waypoints). Traditionally, such models are trained end-to-end for a single platform and a narrow set of tasks. Demonstrating cross-platform adaptability is a step toward more general-purpose, platform-agnostic "brains" for robots.
This work fits into a broader research trend of investigating the generalization capabilities of large foundation models when applied to the physical world. The key question is whether models trained in simulation or on one real-world system can exhibit "common sense" that transfers to novel embodiments.
Potential Implications
If this adaptability proves robust, it could reduce the data and compute requirements for developing new robotic systems. Instead of training a VLA from scratch for every new robot form factor (drone, bipedal robot, autonomous vehicle), engineers could start with a pre-trained, generalist VLA and specialize it with less data. This is analogous to how large language models are pre-trained on broad text corpora and then fine-tuned for specific applications.
For the drone industry specifically, a VLA-based controller could enable more natural, instruction-based piloting (e.g., "follow that car while keeping it in frame" or "inspect the underside of the bridge for cracks") and more robust obstacle avoidance in dynamic environments.
Limitations & Open Questions
The initial announcement leaves several critical technical questions unanswered, which the research community will await from a full paper publication:
- Performance Benchmark: How does the adapted drone controller compare to a state-of-the-art model trained exclusively for drone flight from scratch? Is there a performance trade-off for the convenience of adaptation?
- Adaptation Efficiency: How much drone-specific data was required for the adaptation? The value proposition hinges on this being significantly less than training from scratch.
- Task Scope: What specific drone tasks was the adapted model evaluated on? Simple point-to-point navigation, complex obstacle courses, or long-horizon mission execution?
- Architecture Details: What was the exact adaptation method? Was the entire model fine-tuned, or was a new adapter module inserted?
gentic.news Analysis
This development is a notable data point in the accelerating convergence of AI subfields. It directly connects three major trends we've been tracking: the rise of VLAs as a unifying architecture for robotics (as seen with Google's RT-2), the push for generalization in embodied AI, and the application of foundation model principles to physical systems.
Historically, robot learning has been notoriously siloed. A model for a UR5 arm couldn't control a Spot robot, let alone a drone. This Stanford result suggests that the large, multimodal training datasets used for modern VLAs—often comprising internet-scale images, video, and text—are instilling a form of visuospatial common sense that is not locked to a specific actuator configuration. This aligns with findings from other labs exploring cross-embodiment generalization, though often in simulation. Demonstrating this on real hardware, as Stanford appears to have done, is a more challenging and persuasive step.
From a commercial and research strategy perspective, this work reinforces the value of investing in general-purpose, pre-trained VLA backbones. Companies and labs developing such models (like Google's DeepMind with RT-X, or OpenAI with its rumored robotics efforts) are not just building better robot arms; they are potentially building the foundational controllers for a wide array of future autonomous systems. The next logical step, hinted at by this research, is a systematic exploration of the "transferability spectrum"—determining which skills transfer readily between embodiments and which require extensive re-learning.
Frequently Asked Questions
What is a Vision-Language-Action (VLA) Model?
A VLA model is a type of neural network that processes visual input (like camera frames), understands natural language instructions, and outputs low-level actions to control a robot. It's an end-to-end architecture that aims to translate high-level goals ("pick up the blue block") directly into motor commands, using learned representations from both vision and language data.
Why is adapting a robot arm model to a drone significant?
It's significant because it challenges the assumption that AI controllers are fundamentally tied to the specific physical body they were trained on. Successful adaptation suggests the model learned abstract concepts about physics and space, not just how to move a particular set of joints. This could drastically reduce development time and data needs for new robotic platforms.
What are the main challenges in cross-embodiment transfer for AI?
The primary challenges are the differences in dynamics (the physics of how an arm moves vs. how a drone flies), action spaces (continuous joint angles vs. throttle and pitch/roll/yaw), and perceptual viewpoints. A model must disentangle its understanding of the task from the specific mechanics of its original body to transfer successfully.
Has this work been formally published?
As of this reporting, based on the social media announcement, the work appears to be freshly demonstrated and a formal research paper is likely in preparation or under review. The AI community will be looking for the full paper to evaluate the methodology, results, and benchmarks in detail.