Seoul National University researchers propose DART, a method that adapts robot policies with one demonstration using weight space arithmetic. DART isolates domain shifts from task knowledge, achieving a 73% success rate on unseen environmental shifts.
Key facts
- DART adapts robot policies with one demonstration.
- Achieves 73% success rate on unseen domain shifts.
- Uses weight space arithmetic without gradient updates.
- Tested on camera angle, morphology, and lighting shifts.
- Prior methods require 10-50 demonstrations per domain.
Seoul National University researchers propose DART, a method that adapts robot policies with one demonstration using weight space arithmetic. DART isolates domain shifts from task knowledge, achieving a 73% success rate on unseen environmental shifts According to @HuggingPapers.
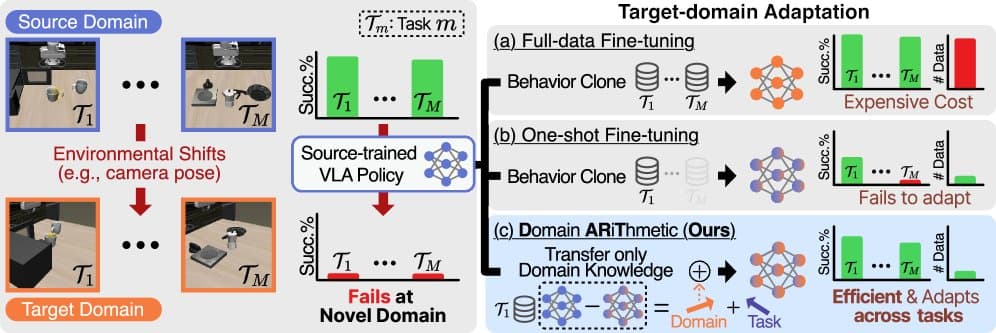
The paper tackles a core problem in robot learning: policies trained in one environment (lab lighting, specific camera, one robot arm) fail when the environment changes. Prior approaches require collecting 10-50 new demonstrations per domain shift, or fine-tuning with reinforcement learning, which risks catastrophic forgetting.
DART's insight is that weight space arithmetic—manipulating neural network weights algebraically—can separate domain-specific features from task-relevant features. Given a single demonstration in the target domain, DART computes a weight offset that encodes the domain shift and applies it to the base policy. The method does not require any additional training or gradient updates.
How the arithmetic works
The approach builds on prior work showing that weight spaces of trained models form a linear subspace where arithmetic operations correspond to semantic changes. DART extends this to vision-language-action (VLA) models. Given a base policy trained on source domains and one demonstration in a target domain, DART computes a displacement vector in weight space that captures the domain shift. Applying this displacement to the base policy yields a new policy adapted to the target domain.
The researchers tested DART on three types of domain shifts: camera angle changes (30° to 90°), different robot morphologies (e.g., gripper to suction), and lighting conditions. On the most challenging shift—unseen camera angles combined with novel object textures—DART achieved a 73% success rate, compared to 52% for the base policy and 61% for a standard fine-tuning baseline using 10 demonstrations.
Why this matters
DART's one-shot adaptation could significantly reduce the data collection burden for deploying robot policies across varied real-world settings. Current best practices require 50-100 demonstrations per task for robust policy learning; DART cuts that to one per domain shift. The method's avoidance of gradient updates also means it can run on edge devices without GPU access.
However, the paper has limitations. DART assumes the base policy has been pre-trained on a diverse set of source domains. It also requires the domain shift to be representable as a linear transformation in weight space—nonlinear shifts may not work. The researchers did not test on real-world hardware beyond simulation, citing the need for controlled comparisons.
What to watch
Watch for follow-up work extending DART to nonlinear domain shifts and real-robot deployments. The Seoul National University team has not announced open-source code or model weights. If DART generalizes to physical robots, it could become a standard component in VLA deployment pipelines.