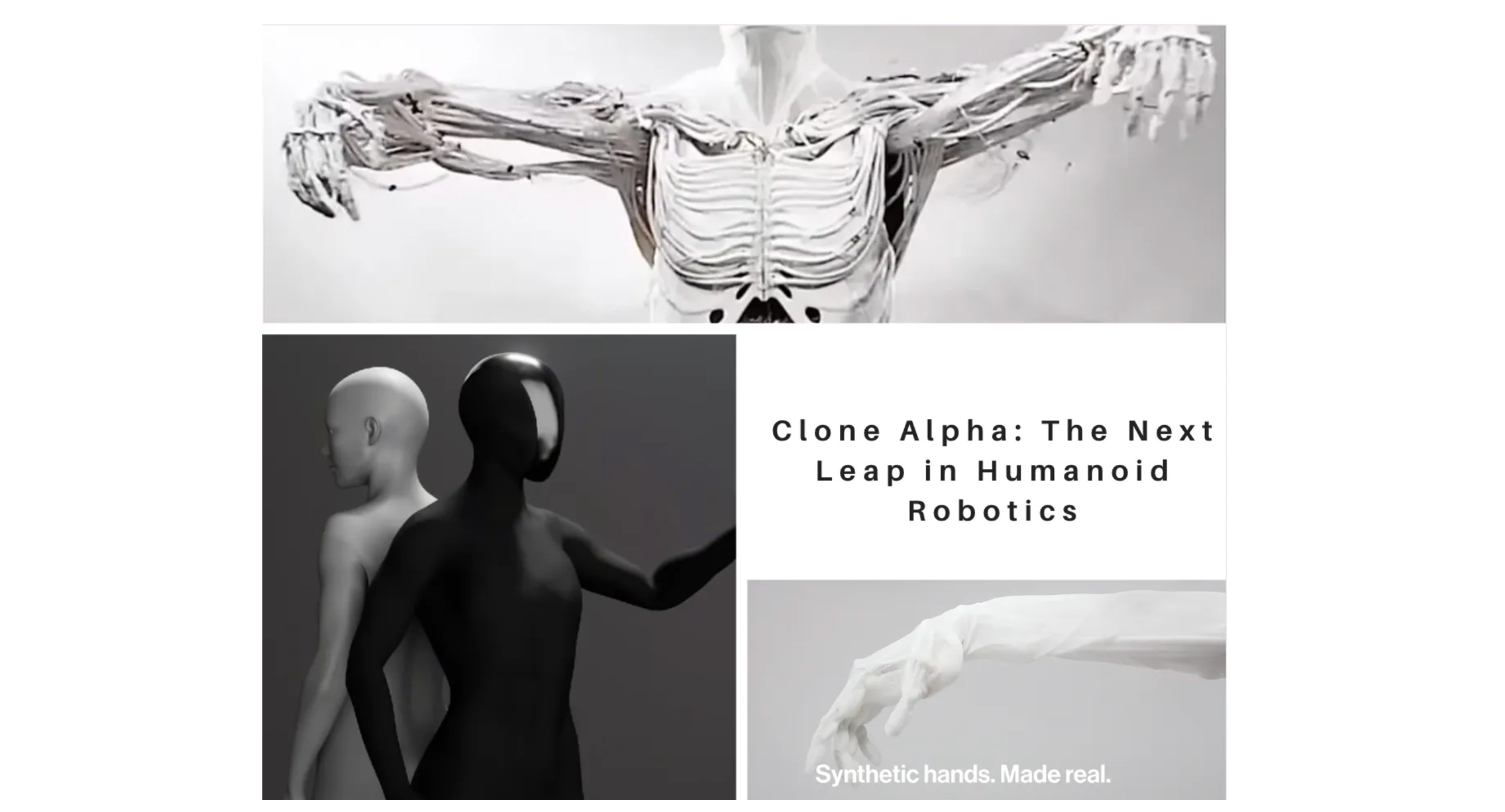
In a pointed critique of current humanoid robotics development, Clone Robotics CEO Dhanush Radhakrishnan has stated the industry is "over-relying on motors and rigid structures." The comment, shared via a social media post, positions his company's approach as a fundamental alternative. Clone Robotics is developing humanoid robots that utilize fluid actuation, proprietary "Myofiber" artificial muscles, and a full anatomical skeleton designed to closely mimic the biomechanics of human movement.
What Clone Robotics Is Building
While technical specifications and performance benchmarks were not detailed in the brief announcement, the core technological divergence is clear. Instead of the rotary electric motors and harmonic drives that form the actuation backbone of most prominent humanoids (like Boston Dynamics' Atlas, Tesla's Optimus, or Figure's 01), Clone Robotics is betting on a different paradigm.
Fluid Actuation & Myofiber Muscles: The company's robots use a system driven by fluids—likely hydraulic or pneumatic—to generate force and motion. This is paired with "Myofiber" artificial muscles. This name suggests a biomimetic actuator designed to emulate the contractile properties of biological muscle fibers, potentially offering advantages in compliance, power-to-weight ratio, and natural movement dynamics.
Full Anatomical Skeleton: The emphasis on an "anatomical skeleton" indicates a design philosophy that replicates human joint kinematics and bone structure. This contrasts with many robotic skeletons that are engineered primarily for simplicity and strength, often sacrificing the nuanced degrees of freedom and passive dynamics of a biological frame.
The stated goal is to "get closer to how real humans move," targeting the uncanny valley of robotic motion by prioritizing biomimicry at a fundamental hardware level.
The Broader Industry Context
Radhakrishnan's critique lands amid a surge in investment and development in general-purpose humanoid robotics. The dominant design language, exemplified by Tesla's Optimus and companies like 1X Technologies, Apptronik, and Unitree, heavily features electric servo motors. These systems offer high precision, good controllability, and are well-understood from an engineering standpoint. However, critics point to limitations in torque density, impact resistance, and energy efficiency compared to biological systems or hydraulic alternatives.
Fluid-powered systems, while powerful and capable of smooth force application, come with their own challenges: they require pumps, valves, and seals, which can introduce complexity, potential leaks, and noise. The pursuit of artificial muscles—including technologies like pneumatic artificial muscles (PAMs), shape memory alloys, and electroactive polymers—has been a long-standing research area aiming to overcome these trade-offs.
What We Don't Know (Yet)

The announcement is high-level. Key details necessary for a technical assessment are absent:
- Performance Metrics: Speed, strength (torque/force), weight, power consumption, and efficiency of the Myofiber system.
- Technical Readiness: TRL (Technology Readiness Level) of the platform. Are these research prototypes or nearing commercial deployment?
- Direct Comparisons: How does its movement quality and task performance compare to state-of-the-art motor-driven humanoids on benchmarks like agility, manipulation, or walking efficiency?
- Commercial Strategy: Target applications, pricing, or availability timeline.
gentic.news Analysis
Radhakrishnan's statement is a deliberate positioning against the prevailing architectural consensus in humanoid robotics. It echoes a historical tension in robotics between engineered efficiency and biological fidelity. While motors dominate for practical reasons today, the pursuit of artificial muscles represents a potential path toward robots that are safer, more robust, and more energy-efficient in unstructured environments.
This critique aligns with ongoing research threads outside the commercial spotlight. Academic labs and DARPA programs have long invested in soft robotics and novel actuators. Clone Robotics appears to be attempting to translate these research concepts into a full-scale humanoid platform—a significantly ambitious undertaking. The success of this approach hinges on whether the Myofiber system can surpass motors not just in biomimicry, but in the critical metrics of cost, reliability, and controllability that determine commercial viability.
The humanoid space is currently defined by a race to integrate existing components (motors, batteries, AI models) into a working system. Clone Robotics is making a riskier, long-term bet that a breakthrough in fundamental actuation technology is necessary to unlock true general-purpose utility. If their Myofiber muscles deliver a decisive advantage in power density or compliance, it could force a hardware paradigm shift. If not, they risk being an interesting footnote while motor-based platforms iterate toward sufficiency. The burden of proof is now on Clone Robotics to demonstrate their system's superiority with concrete, verifiable performance data.
Frequently Asked Questions
What are Myofiber artificial muscles?
Based on the name and context, Myofiber artificial muscles are likely a proprietary type of actuator developed by Clone Robotics designed to mimic biological muscle fibers. They probably contract and expand in response to a fluid pressure change (hydraulic or pneumatic), generating linear force. The goal is to replicate the smooth, compliant, and powerful characteristics of natural muscle, which are difficult to achieve with rotary electric motors.
Why are most humanoid robots using motors instead of fluid systems?
Electric motors are widely used due to their high precision, excellent controllability with mature electronics, cleanliness (no fluids), and relatively high efficiency in converting electrical energy to motion. They form the basis of a vast global supply chain. Fluid systems (hydraulics), while powerful and capable of smooth force control, often involve more complex ancillary systems (pumps, reservoirs, hoses), potential leakage, and can be noisier, making them less desirable for consumer or indoor-focused applications.
What is the main advantage of a "full anatomical skeleton"?
An anatomical skeleton aims to replicate the exact kinematics, joint ranges of motion, and passive dynamics of the human body. This can lead to more natural, efficient, and human-like movement patterns. It may also simplify the transfer of motion-capture data or biomechanical control strategies from humans to robots, as the underlying mechanics are similar. In contrast, a simplified engineered skeleton might be stronger or easier to manufacture but could limit movement dexterity or require more complex software to compensate for non-biological mechanics.
Has anyone else successfully used artificial muscles in humanoid robots?
While there are many research prototypes using pneumatic artificial muscles (PAMs) and other novel actuators in robotic limbs or torsos, a commercially viable, full-scale humanoid robot primarily driven by such technology does not yet exist. The ECCE Robot project from the EU and various academic labs have built impressive upper bodies. Clone Robotics is notable for attempting to scale this approach to a complete, bipedal humanoid form factor, which is a significant engineering challenge.